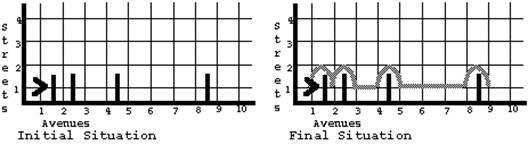
Karel must run a hurdle race, jumping over hurdles or running straight when no hurdle is present. There will be at most, 8 hurdles, so the race is 8 blocks long (the race always ends at 1 st Street and 9 th Avenue. However, the arrangement of the hurdles can change from race to race. So be sure that your hurdler can run any such race. See the example initial and final situations below.
World File: hurdles.kwld BACK TO KAREL MAIN
Program 4-2: The CarpetLayer Class
Karel has a new job, carpeting rooms along an 8-block section of his world. A room is a “two-space” column that is enclosed by wall segments to the west, north and east. The door is to the south. Karel is to place a beeper in each space of the room. He begins the job with an infinite number of beepers in his bag. As with the previous tasks, Karel should be able to carpet any such 8-block section. See the example initial and final situations below.
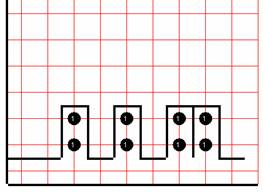
World File: carpet.kwld BACK TO KAREL MAIN
Program 4-3: The ColumnHarvester
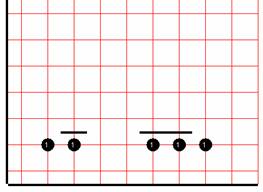
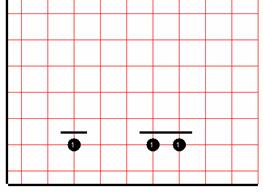
Karel must now harvest 8 columns of beepers. There are exactly 3 beepers in any given column. Again, it is necessary to program Karel so that he can harvest any such field, not just the one in the example. See the example initial and final situations below. Karel begins the task at (1,1), facing East.
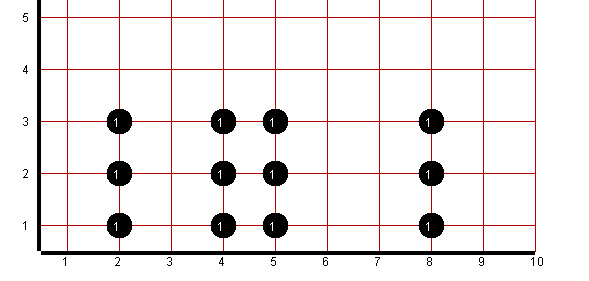
World File: columns.kwld BACK TO KAREL MAIN
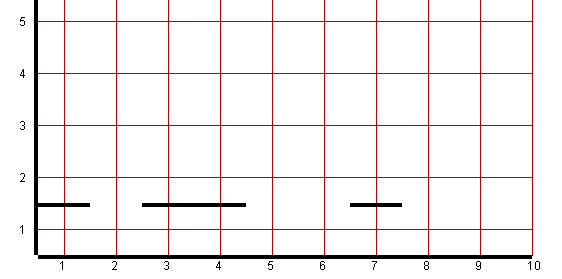
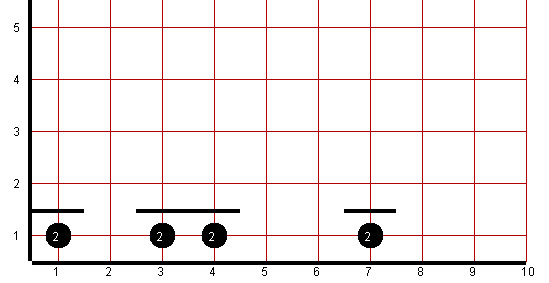
Karel needs to complete “stacks” of beepers – three high. He begins at (1, 1) and checks to see if there is a beeper there. If there is, he completes the stack by adding two more beepers on top, for a total of three. If there is no beeper there, he does nothing and moves on. He completes his task when he has reached (1, 8) and completed all necessary stacks. See an example initial and final situation below.
Initial Situation Final Situation
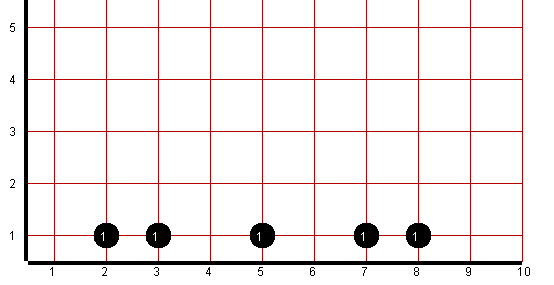
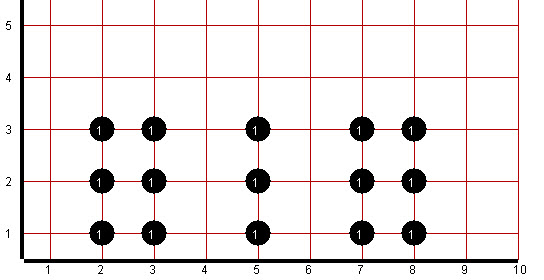
World File: stacks.kwld BACK TO KAREL MAIN
Program 4-5: The PlaceSetter
Karel needs to set a “place” (two beepers), anywhere there is a table (wall) to his left. He begins at (1, 1) and checks to see if there is a wall to his left. If there is, he sets the place by putting two beepers at the current location. If there is no wall to the left, he does nothing and moves on. He completes his task when he has reached (1, 8) and set all necessary places. See an example initial and final situation below.
Initial Situation Final Situation
World File: places.kwld BACK TO KAREL MAIN
Karel has been assigned the task of completing a chain of beepers. The chain is 5 blocks long and each link must contain 2 beepers. He begins the job with 10 beepers in his bag. See the example initial and final situations below. Karel begins the task at (1,1), facing East.
Initial Situation Final Situation
World File: chain.kwld BACK TO KAREL MAIN
Karel has now been hired to pick eggs and place them in cartons. The role of the egg will be played by our versatile beeper. An egg is ready to be picked as long as a hen is not sitting on it (hens are characterized by horizontal walls). Karel must walk the hallway of the chicken coop, which is along 1 st street. If there is an egg in any given cage in the coop, he pick it up as long as a hen is not sitting on it. When finished, Karel should go to 3rd Street and 1 st Avenue, which is where the eggs will be placed in cartons, and shut off. As with the previous tasks, Karel should be able to pick eggs in any such arrangement. See the example initial and final situations below.
World File: eggs.kwld BACK TO KAREL MAIN
Program 4-8: The TopOff Class
Karel will now go down first street and "top off" any beepers that he encounters in the first 8 blocks. Topping off involves putting a beeper on top of any existent beeper that is there. One catch - Karel can only start the task with 5 beepers. So when he runs out of beepers, he can no longer "top off," even when he encounters a beeper that needs "topping off." See the example initial and final situations below.
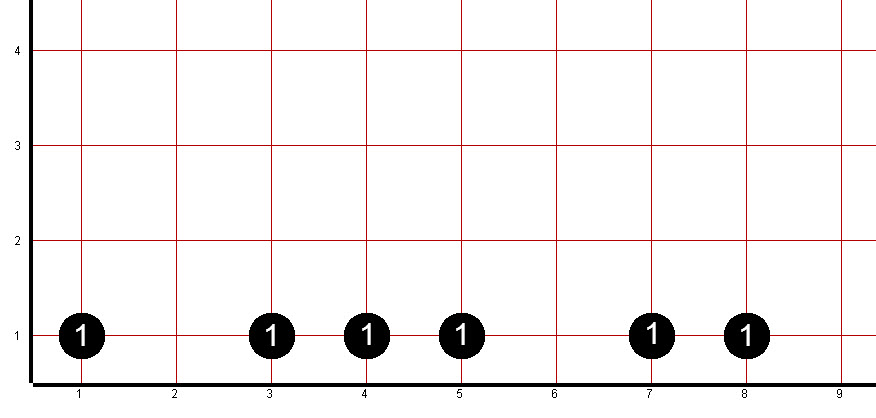
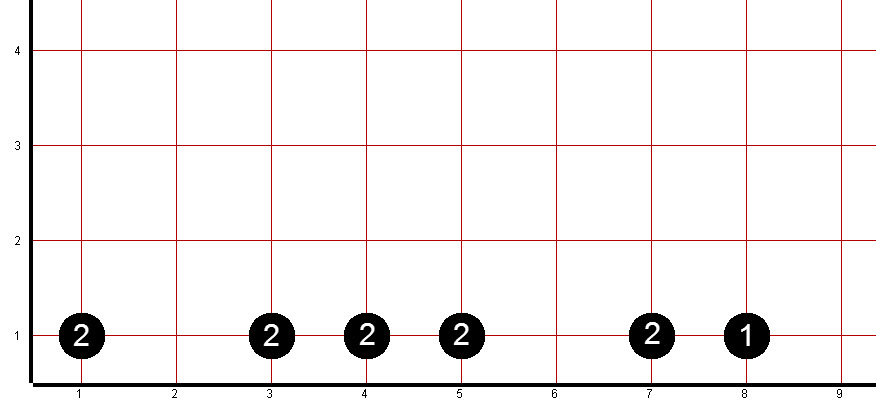
World File: topoff.kwld BACK TO KAREL MAIN
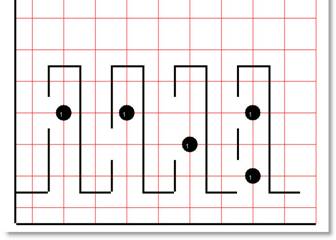
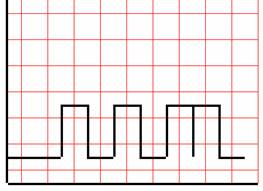
Program 4-9: The SteepleChaser Class - AP ONLY
Karel will now run a steeple chase which is like a hurdle race with a twist. Each steeple can be 1, 2 or 3 wall sections high. Like the previous hurdle race, the number of steeples is unknown and they are placed in random locations. The race begins at (1,1) and ends at (1,9). See the example race below. In completing this problem, you must write and use a boolean method called rightIsClear().
World File: fig5-5.kwld BACK TO KAREL MAIN
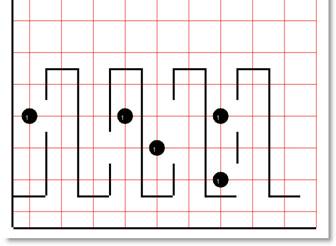
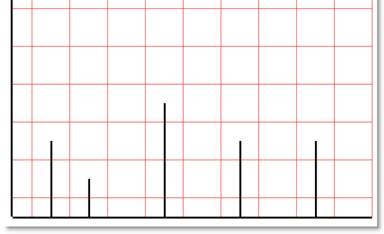
Program 4-10: The BeepleChaser Class - AP ONLY
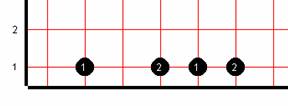
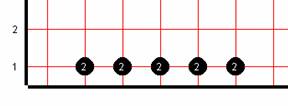
Karel will now run a different type of steeple chase in which the steeples are made of beepers. Instead of jumping the steeples, the robot picks them up. Each steeple is made up of columns of beepers that are 1, 2 or 3 beepers high (each location contains no more than one beeper however and there are no gaps in the columns). As before, the number of steeples is unknown and they are placed in random locations. The race begins at (1,1) and ends at (1,8). The world will be clear of all beepers when the race is finished. See the example race below.
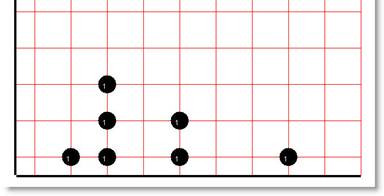
World File: fig5-7.kwld BACK TO KAREL MAIN