Every morning Karel is awakened in bed when the newspaper, represented by a beeper, is thrown on the front porch of his house. Program Karel to retrieve the paper and bring it back to bed. See the initial situation below.
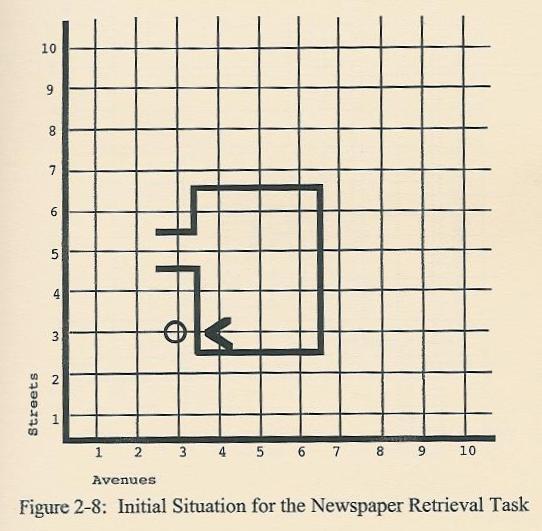
World File: fig2-8.kwld BACK TO KAREL MAIN
Program 2-2: Plant the Flag!
Karel has to scale a mountain, plant a flag, then descend the mountain on the other side. Karel must begin the task with a flag-beeper in his beeper bag. Karel must also follow the path shown in the diagram below - he is climbing, not flying!
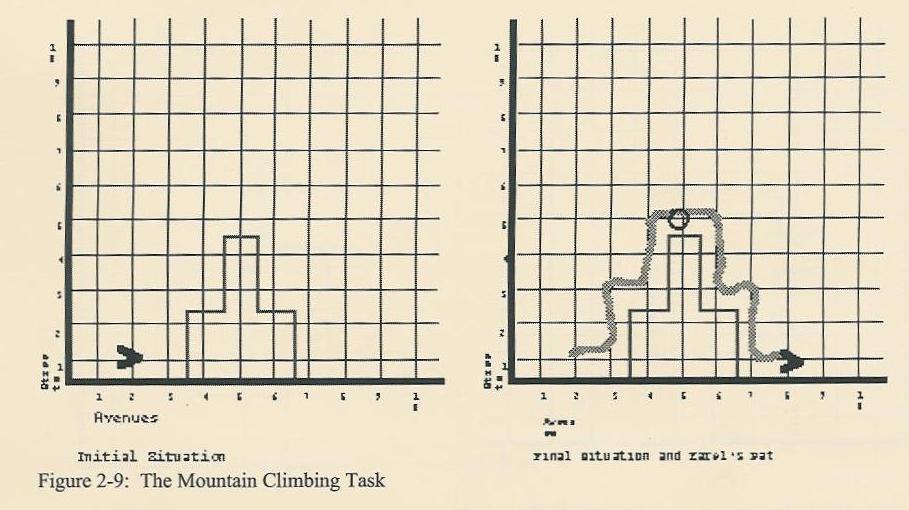
World File: fig2-9.kwld BACK TO KAREL MAIN
On the way home from grocery shopping, Karel's bag ripped open, leaking a few items. The items are represented by - you guessed it - beepers. Karel needs to go back and pick these items up and return to his starting position. See the initial situation below.
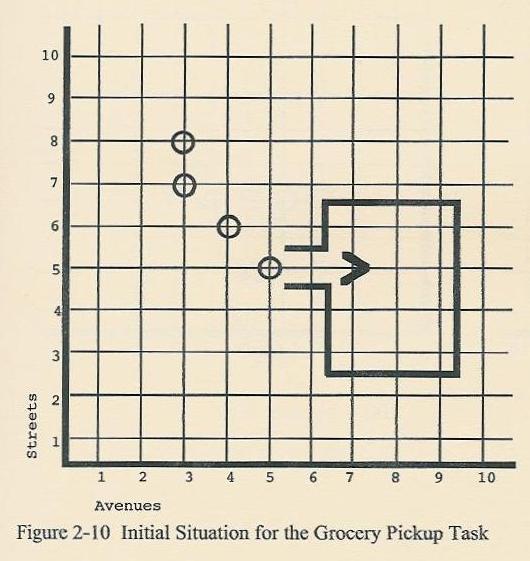
World File: fig2-10.kwld BACK TO KAREL MAIN
Karel must rearrange a column of beepers into a row of beepers. This requires picking the beepers up, then placing back down as seen in the example Note that the middle beeper does not change position. See the initial and final situations below.
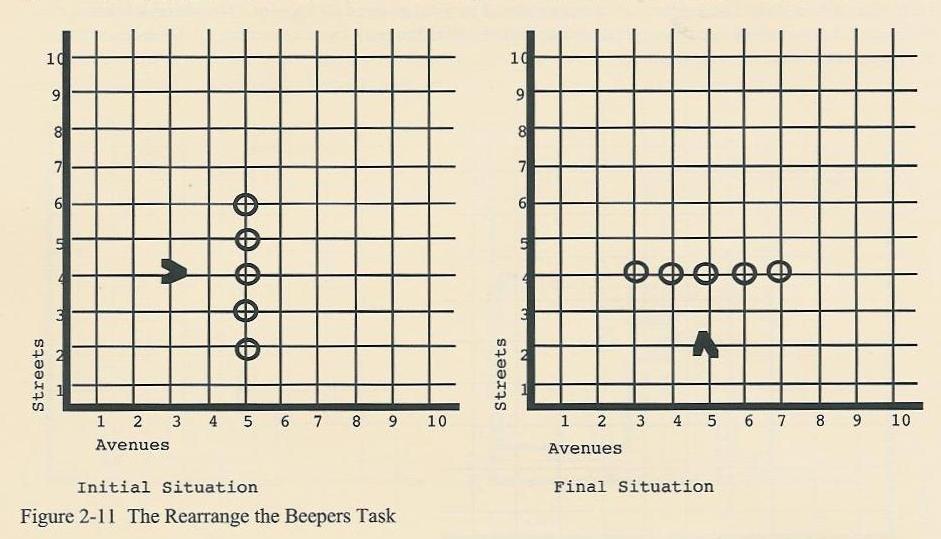
World File:fig2-11.kwld BACK TO KAREL MAIN
Karel must spell out your inititals using beepers. Make the initials at least 5 beepers high. See below for an example using my initials, DRS. Start with an infinite number of beepers (recall that is done with a -1).
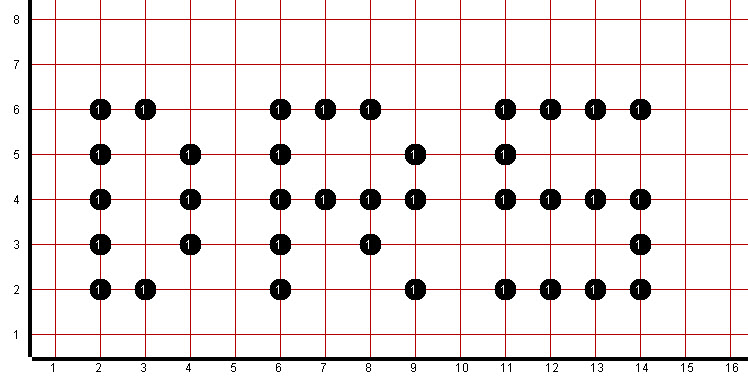
World File: blank2.kwld BACK TO KAREL MAIN