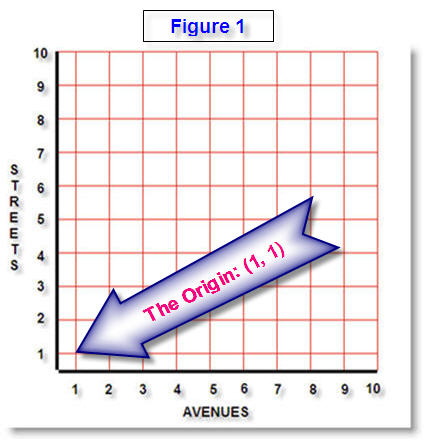
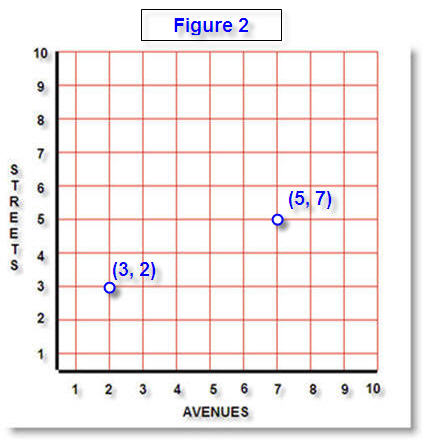
Karel has the ability to move along streets and avenues and stop only at intersections of streets and avenues. His current location is denoted by the coordinate (Street, Avenue). Note that this is opposite from what we are used to in Algebra where we give the horizontal coordinate before the vertical coordinate. See the example coordinated below in Figure 2.